


Кога роверот Кјуриосити во 2012 година слета на Марс, постоеше мислење дека тежината (на Марс е тежок 340 кг.) и РТГ ќе бидат потенцијално најголем проблем да остане долго оперативен. Но, пред три години од НАСА започнаа да пристигнуваат алармантни предупредувања дека кај роверот најмногу настрадале тркалата! Поради тоа, тие морале да го возат наназад, за да го намалат трошењето на предните тркала.
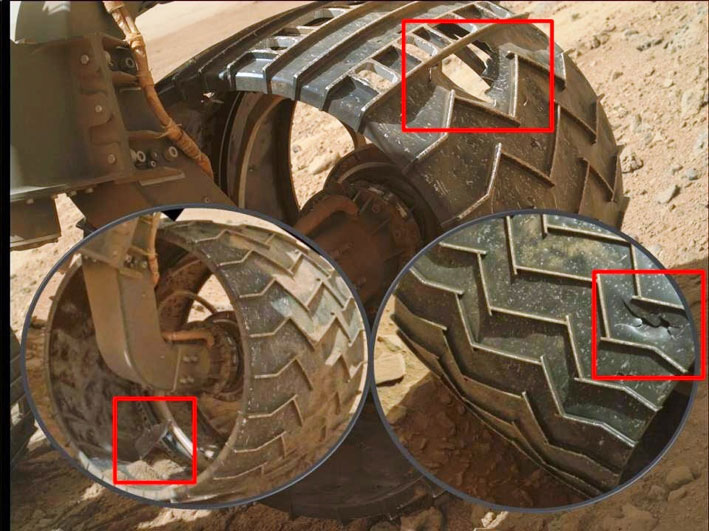
Видливи оштетувања на тркалата на роверот Кјуриосити
За таа цел, научниците од Калифорнија (САД), успеале да смислат алгоритам, кој ќе им помогне роверот да работи со „влечна контрола“. Софтверот ќе ја прилагодува брзината на тркалата кај роверот во зависност од камењата на кои ќе се качува. По 18 месеци тестирање во лабораторијата за млазен погон на НАСА во Пасадена, софтверот е пуштен во употреба.
Дури и пред 2013 гoдина сите шест тркала на роверот на рамен терен се вртеле со иста брзина. Но, штом ќе дошле на нерамен терен, косините предизвикувале предните или задните тркала да се вртат во место.
Ова е посебно проблематично кога подлогата содржи остри камења. Затоа, сега се поставени појачувања, наречени „ребра“, на сите тркала на Кјуриосити, кои се дизајнирани за качување по камења. Но, просторот помеѓу нив е во голема опасност.
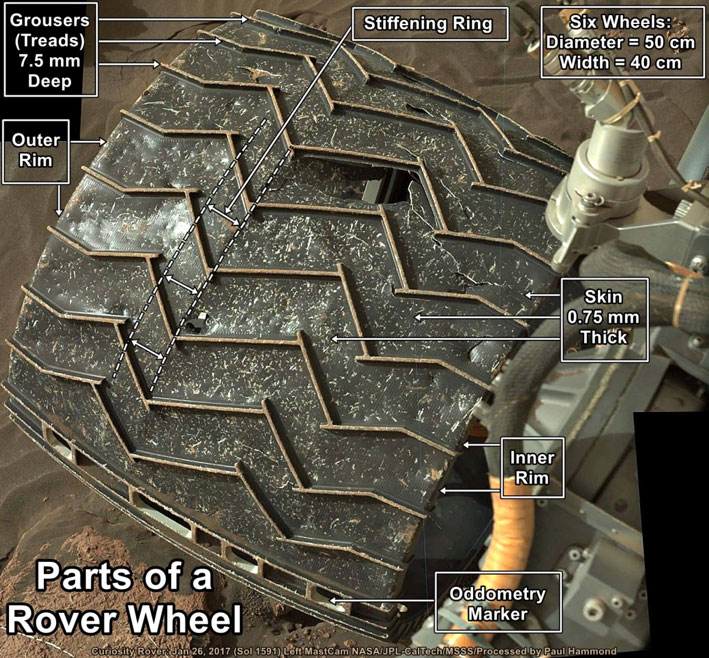
Алуминиумското тркало на роверот со технички опис. Сликата е од Марс. Тестирањата покажаа дека кога ќе отпаднат три (од 19) ребра за појачување, тоа значи дека тркалото веќе поминало 60% од својот работен век.
Според раководителот на тимот за тестирање на софтверот, доколку обвивката на тркалото налета на остар камен, сигурно ќе биде пробиена помеѓу „ребрата“. Загрижата постои највеќе кај металната површина на тркалата. Иако, според тимот, таа може да трае со години, тие се обидуваат да го продолжат нивниот век на траење.
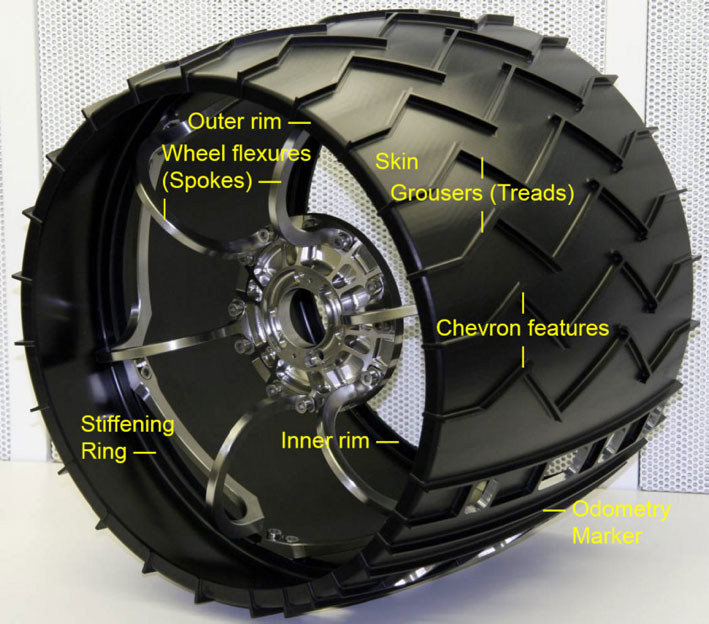
Вака изгледало тркалото на роверот пред да тргне од Земјата.
Алгоритмот на влечната контрола користи податоци во реално време и ја подесува брзината на секое тркало. Со тоа, се намалува притисокот врз камењата. Софтверот ги мери промените во системот на секое тркало и така пресметува кое тркало е „нападнато“. Потоа, компјутерот ја одредува вистинската брзина, со што се избегнува излизгување, а се зголемува погонот на роверот.
При тестирањата, тркалата на роверот се возени над 15 сантиметри со високи сензори и притоа погонските тркала биле за 20% помалку оптеретени, а средните за 11%.
Задното десно тркало налетало на цврст остар камен на 631-ви сол (ден на Марс), но тркалото не било дупнато, иако лимот е дебел само 0.75 мм.
Влечната контрола пријавила проблем со „пливање“ на тркалата во воздух. Повремено се случува, кога роверот се искачува преку некакви препреки, некои од погонските тркала да се најдат во воздух. Кога алгоритмот ова ќе го детектира, тој ќе ја прилагоди брзината на сите останати тркала, сè додека сите не дојдат повторно во контакт со тлото.
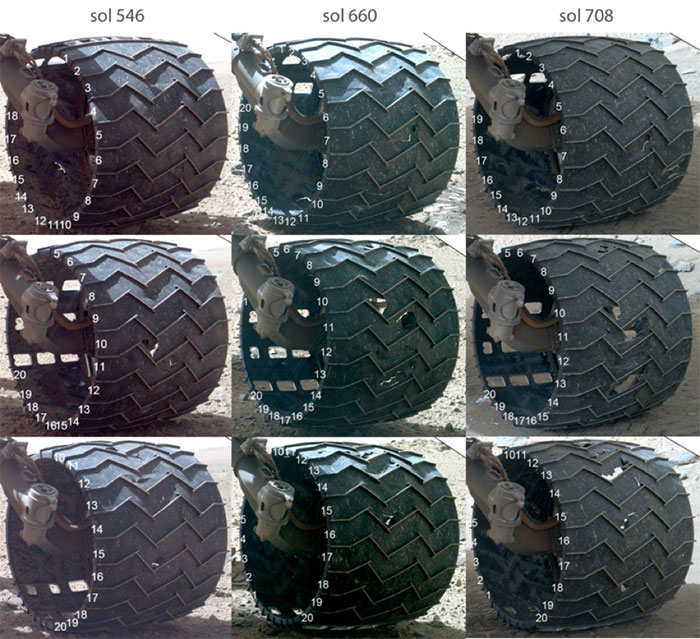
Оштетување на левото средно тркало на 546, 660 и 708-ми сол. Просторот помеѓу зајакнувањата е нумериран заради подобра ориентација.
Превод: Петар Ивановски
Извор: Астрономски Магазин



{kind=link}